2.4. Trailbreaker 电子琴实例讲解¶
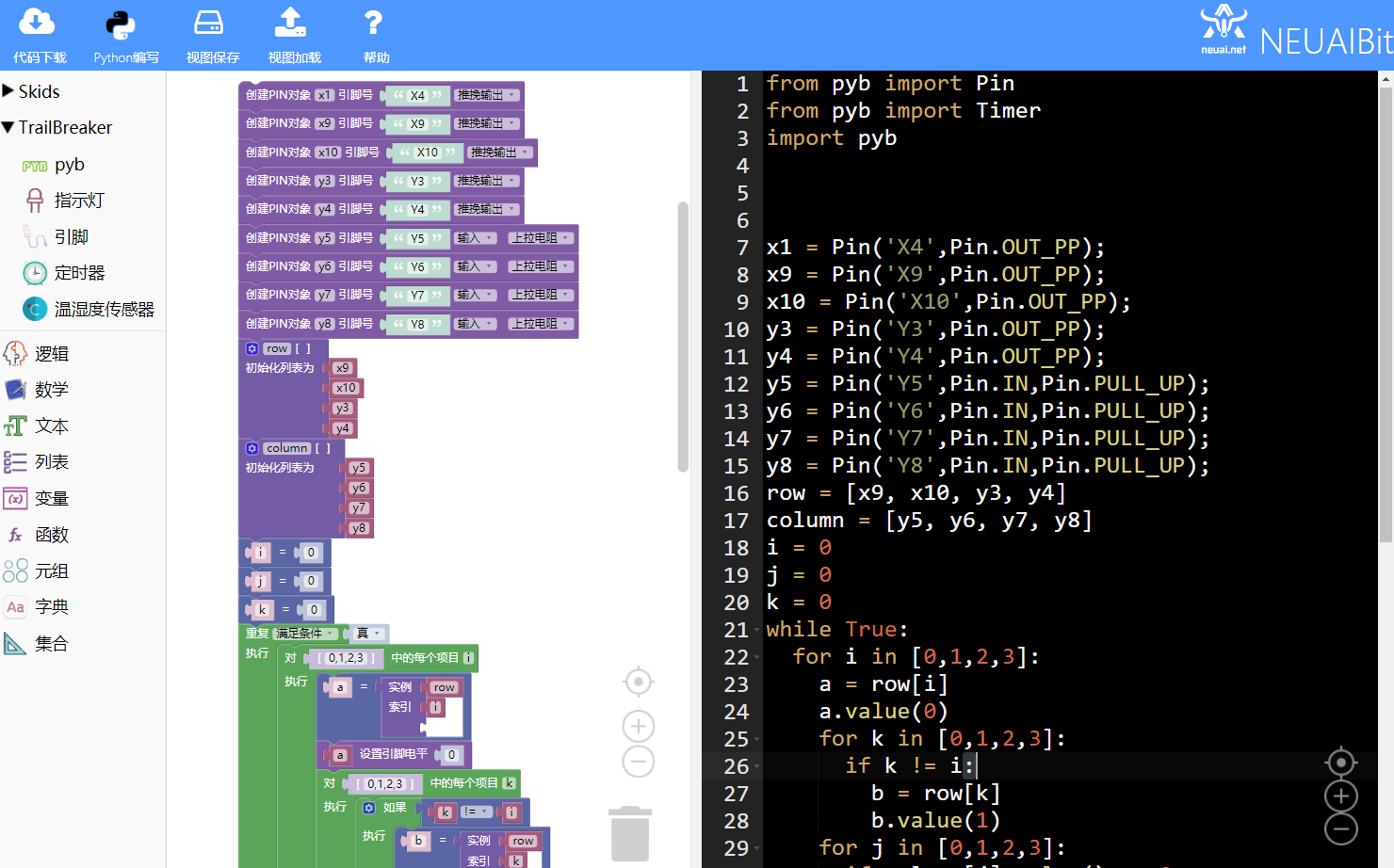
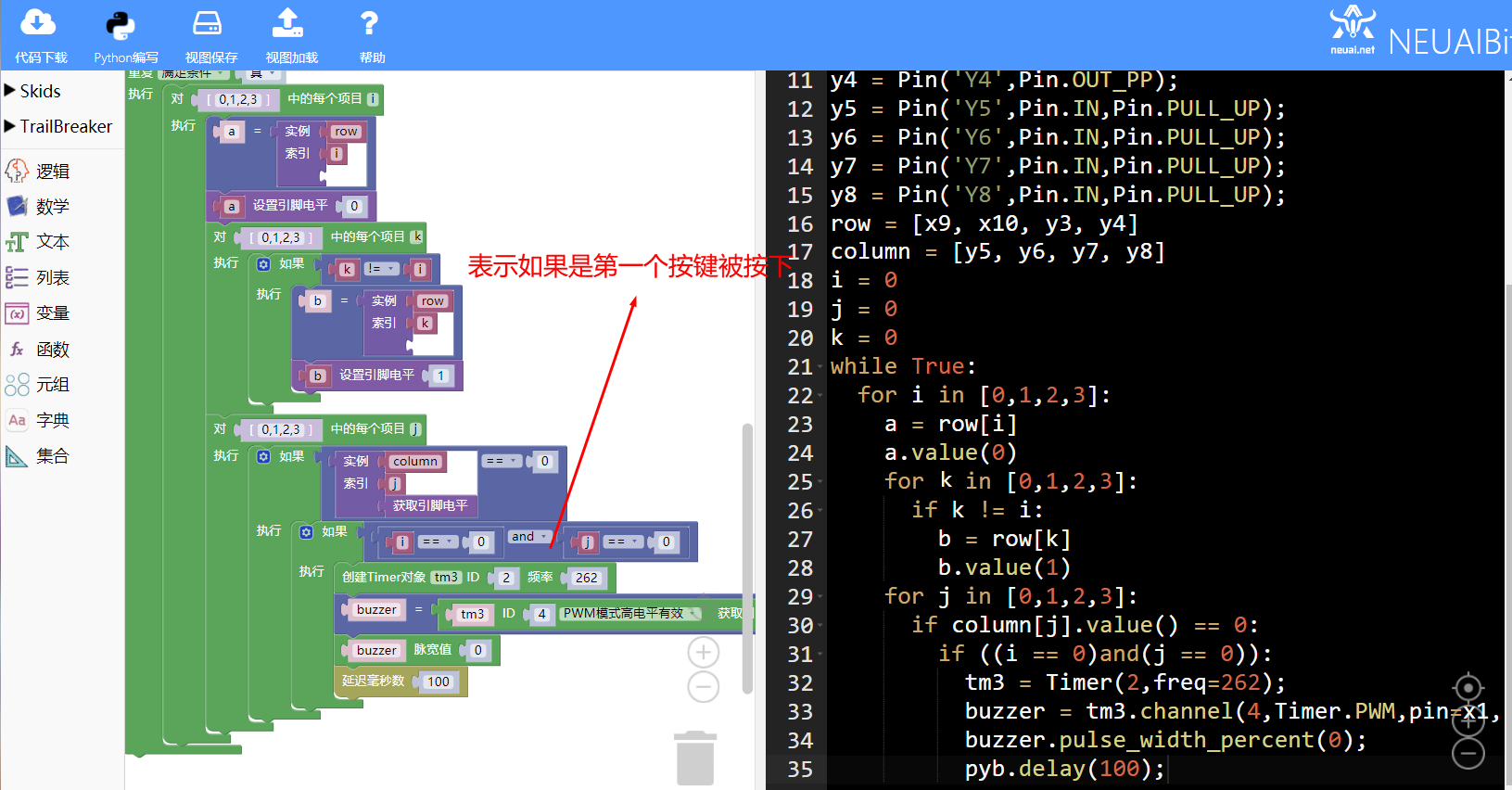
- 如下图显示电子琴实例的最终程序
2.4.1. 本章可以学到什么¶
- 知识点
- 积木块的基本操作
- 变量积木块的使用
- 循环积木块的使用
- 条件积木块的使用
- 定时器积木块的使用
- 编程的思路
2.4.2. 使用到的积木块列表¶
- 逻辑列表中的循环积木块
|
循环重复执行一些动作。 代码:while True: |
|
条件语句 代码:if False:
|
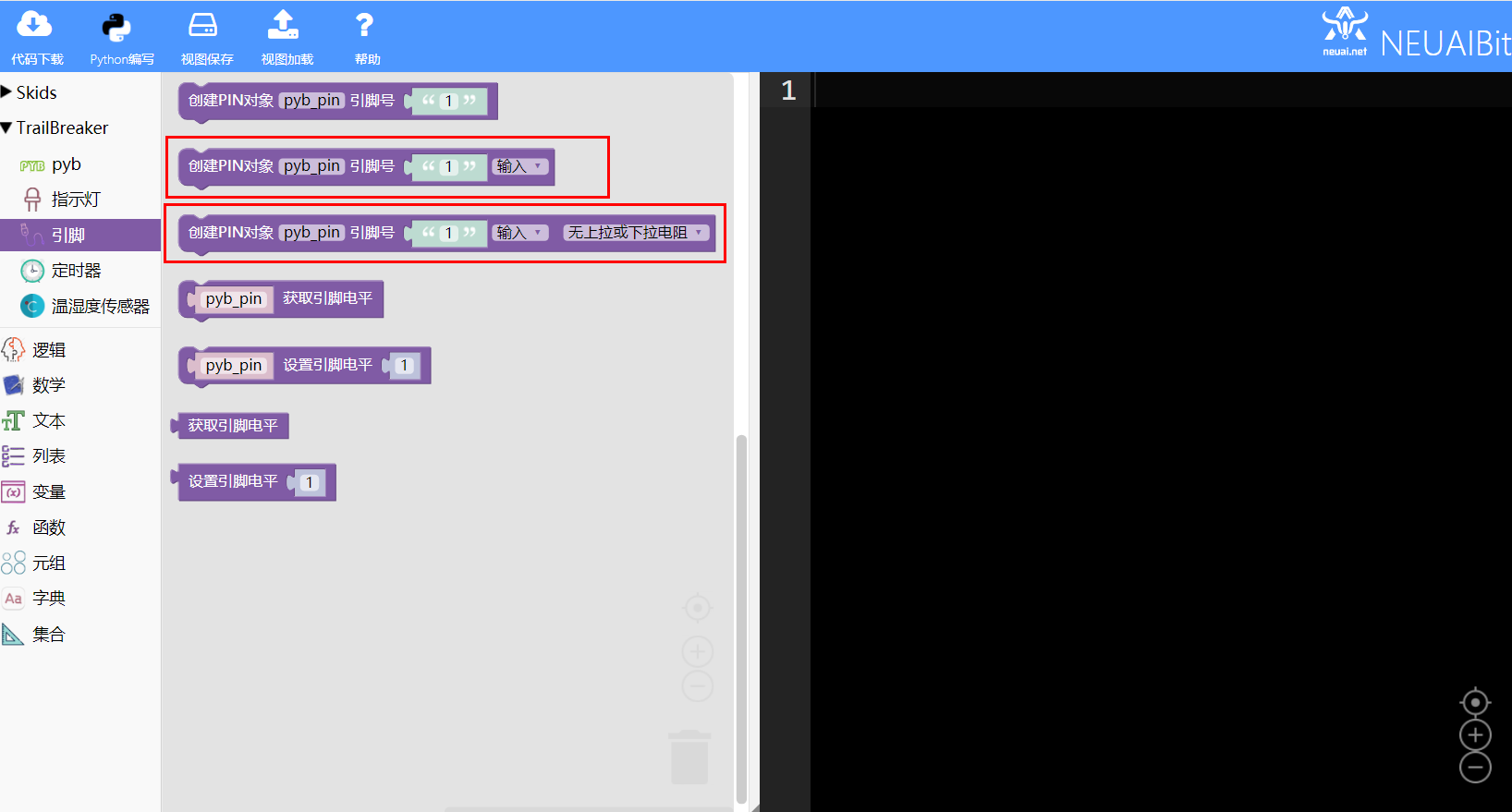
- Trailbreaker PIN功能块

|
创建一个PIN对象,参数为引脚号,引脚模式 代码:pyb_pin = Pin(‘1’,Pin.IN); |
|
设置引脚值 代码:pyb_pin.value(1) |
- Trailbreaker Timer功能块

|
初始化定时器,参数为定时器序号,频率 代码:pyb_timer = Timer(1,freq=100); |

|
初始化并返回一个定时器通道对象 代码:pyb_timer.channel(1,Timer.PWM,pin=Pin.cpu.C6); |

|
设置与通道相关的脉宽百分比 代码:channel.pulse_width_percent(0); |
- Pyb时间相关的功能块
|
延迟给定的毫秒数 代码:pyb.delay(50); |
2.4.3. 实现思路¶
首先获取蜂鸣器(X4)和行列的引脚(X9,X10,Y3,Y4,Y5,Y6,Y7,Y8),然后一行一行拉低电平,拉低一行的时候其它行拉高,并判断被按键下是哪一列 即电平是否是低电平,同时去检查行列的索引来确定是哪个按键,通过PWM控制蜂鸣器发出声音。
2.4.4. 操作步骤¶
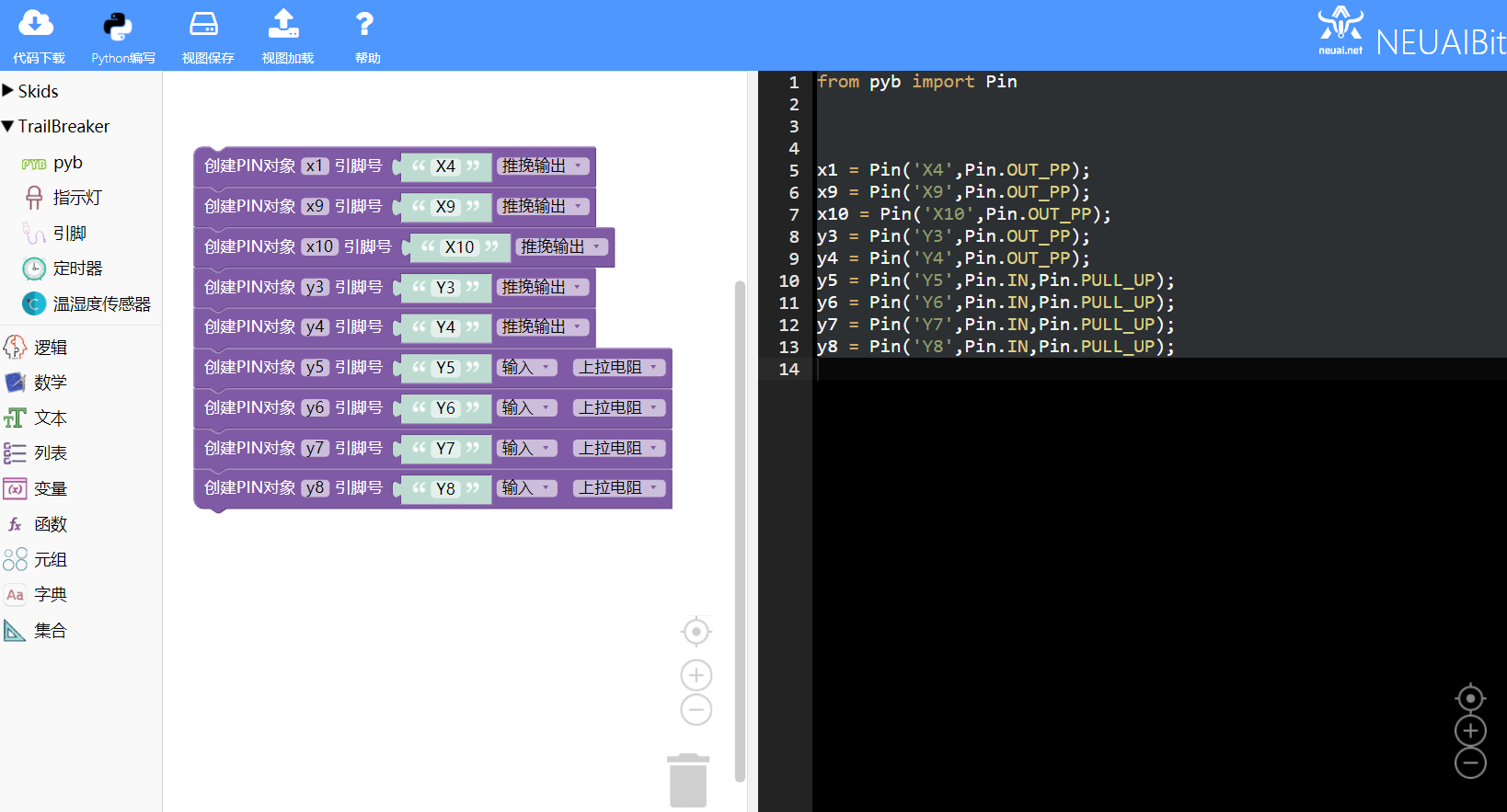
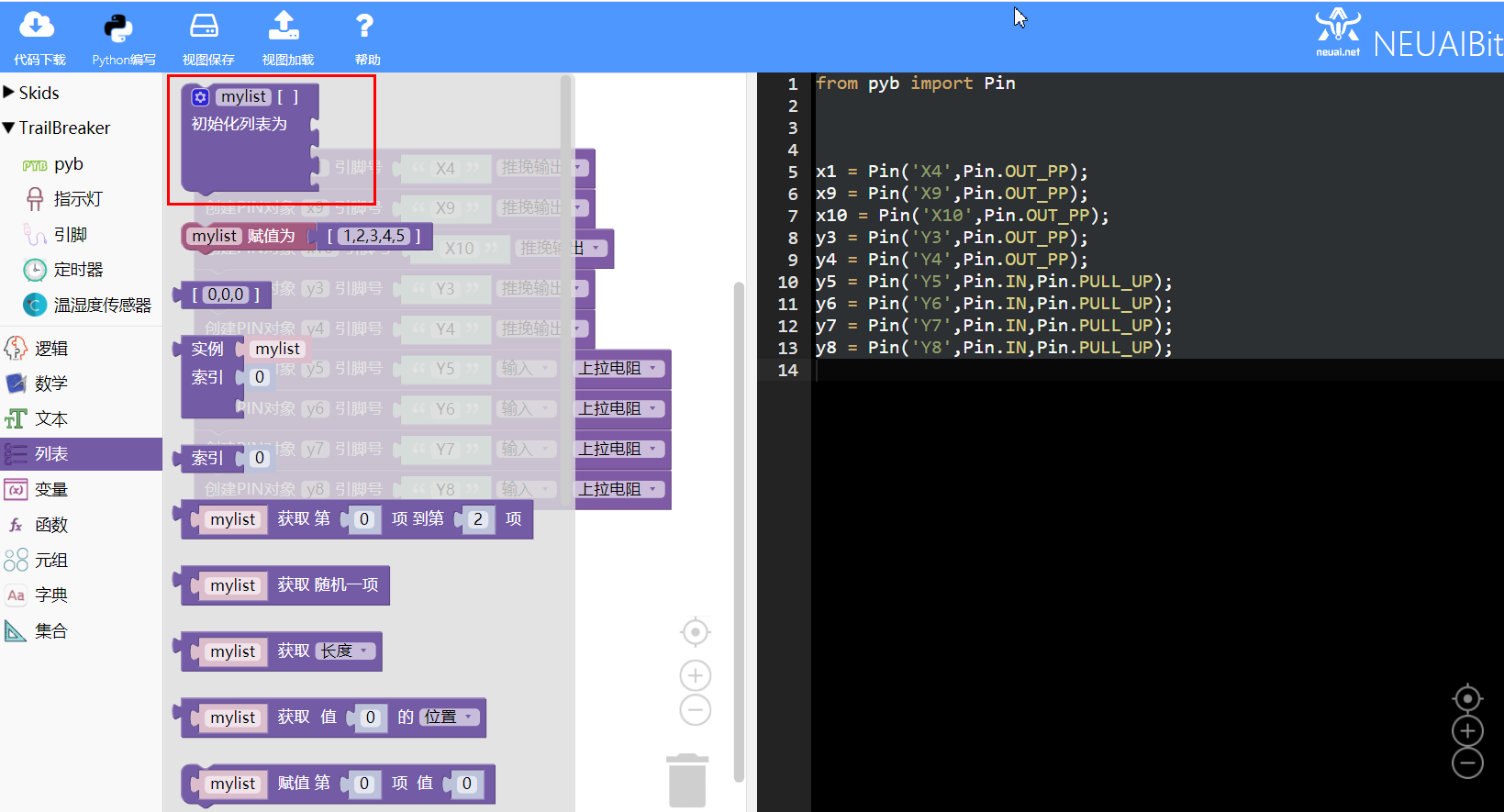
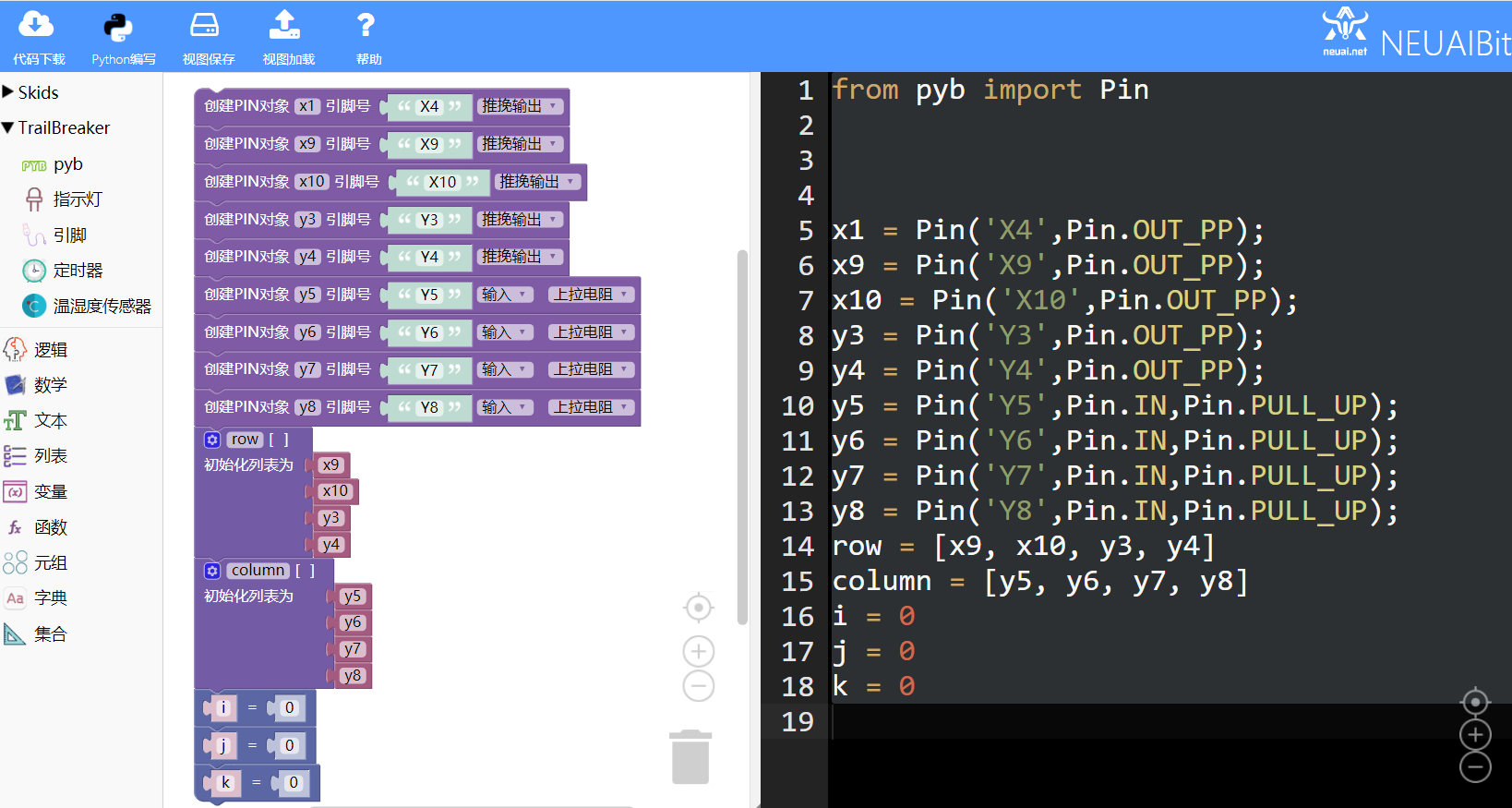
创建行列和蜂鸣器的PIN对象
创建数组对象保存行列的引脚对象并初始化三个索引值
使用循环嵌套先拉低一行引脚
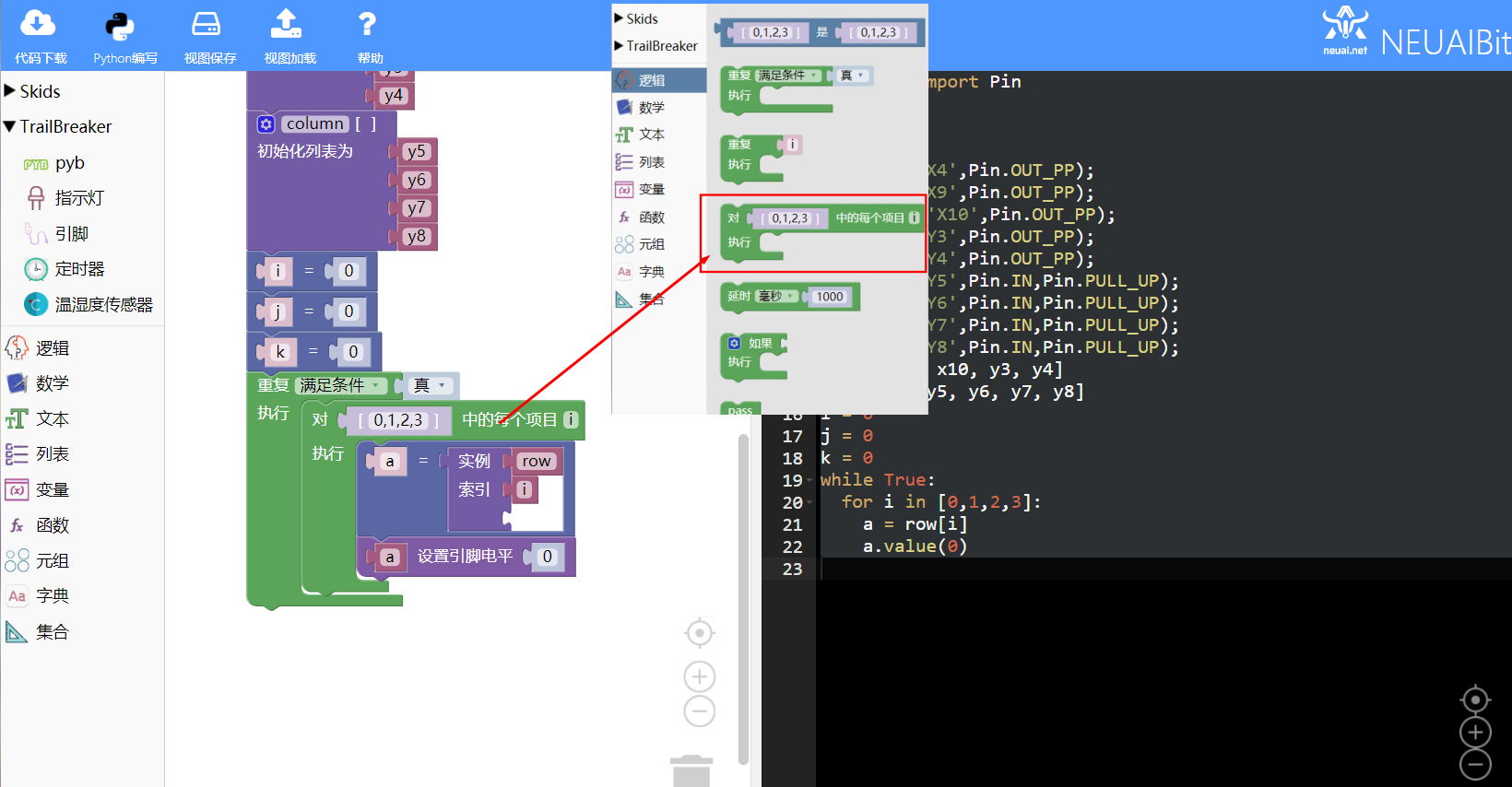
拉低一行的时候去拉高其它行引脚
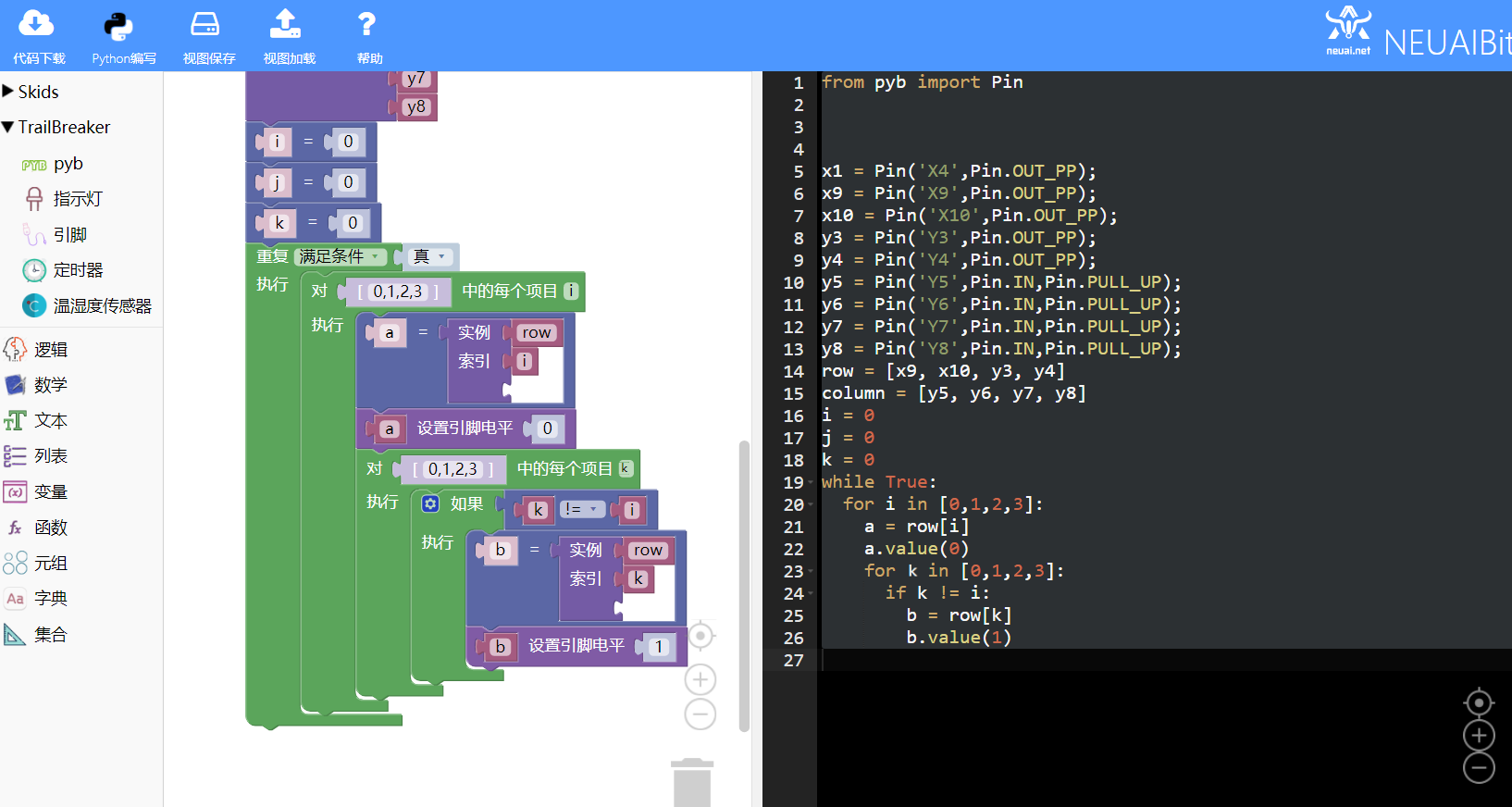
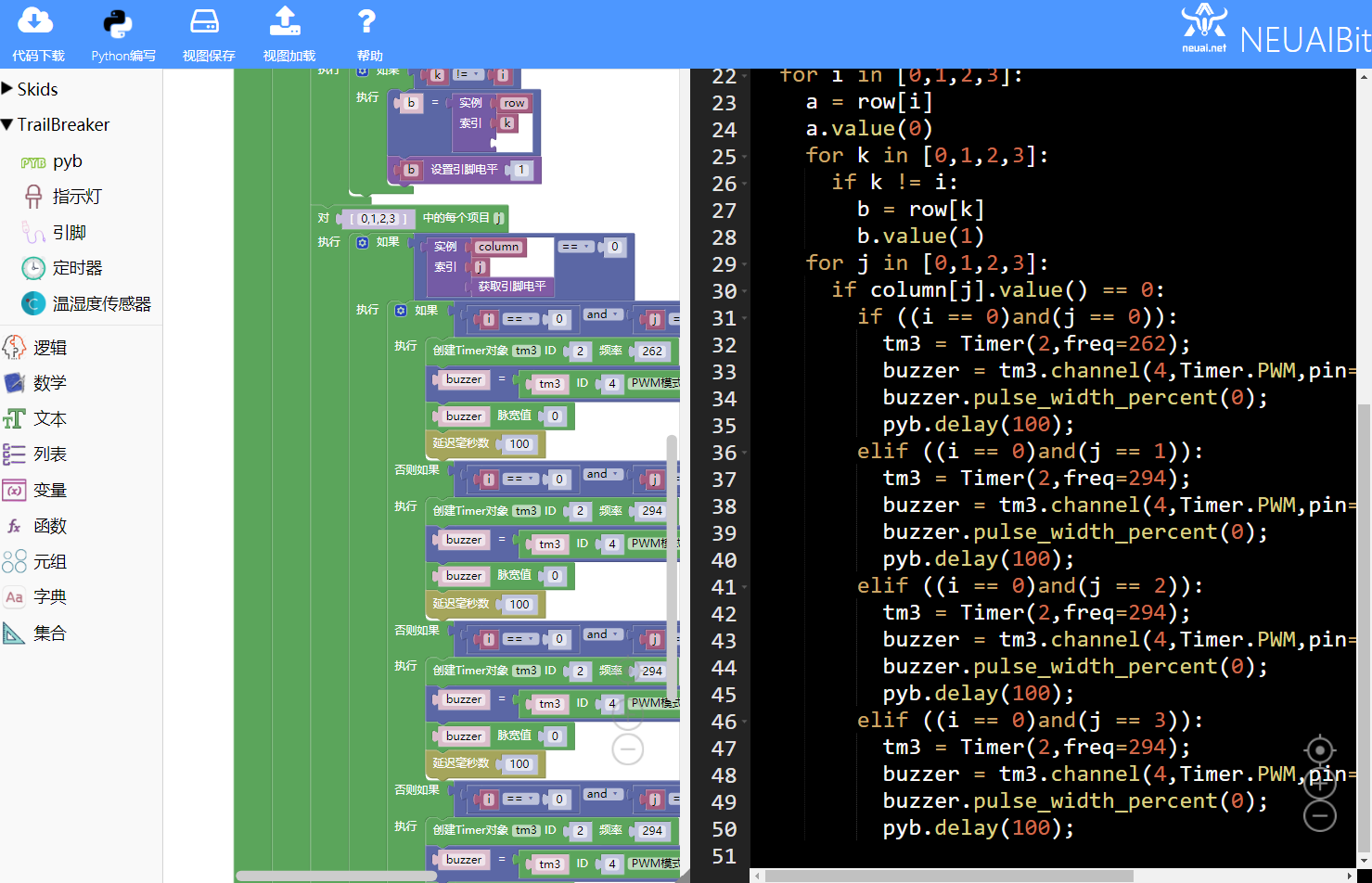
判断每列的引脚是否有低电平并确定行列的索引
最后判断所有行列的索引并配制蜂鸣器。
代码如下是判断第一行按键,从第二行开始的代码和第一行的类似就是i,j的值不一样如(1,0),(1,1),(1,2),(1,3)等等:
from pyb import Pin
from pyb import Timer
import pyb
x1 = Pin('X4',Pin.OUT_PP);
x9 = Pin('X9',Pin.OUT_PP);
x10 = Pin('X10',Pin.OUT_PP);
y3 = Pin('Y3',Pin.OUT_PP);
y4 = Pin('Y4',Pin.OUT_PP);
y5 = Pin('Y5',Pin.IN,Pin.PULL_UP);
y6 = Pin('Y6',Pin.IN,Pin.PULL_UP);
y7 = Pin('Y7',Pin.IN,Pin.PULL_UP);
y8 = Pin('Y8',Pin.IN,Pin.PULL_UP);
row = [x9, x10, y3, y4]
column = [y5, y6, y7, y8]
i = 0
j = 0
k = 0
while True:
for i in [0,1,2,3]:
a = row[i]
a.value(0)
for k in [0,1,2,3]:
if k != i:
b = row[k]
b.value(1)
for j in [0,1,2,3]:
if column[j].value() == 0:
if ((i == 0)and(j == 0)):
tm3 = Timer(2,freq=262);
buzzer = tm3.channel(4,Timer.PWM,pin=x1,pulse_width_percent=50)
buzzer.pulse_width_percent(0);
pyb.delay(100);
elif ((i == 0)and(j == 1)):
tm3 = Timer(2,freq=294);
buzzer = tm3.channel(4,Timer.PWM,pin=x1,pulse_width_percent=50)
buzzer.pulse_width_percent(0);
pyb.delay(100);
elif ((i == 0)and(j == 2)):
tm3 = Timer(2,freq=294);
buzzer = tm3.channel(4,Timer.PWM,pin=x1,pulse_width_percent=50)
buzzer.pulse_width_percent(0);
pyb.delay(100);
elif ((i == 0)and(j == 3)):
tm3 = Timer(2,freq=294);
buzzer = tm3.channel(4,Timer.PWM,pin=x1,pulse_width_percent=50)
buzzer.pulse_width_percent(0);
pyb.delay(100);