2.3. Trailbreaker 步进电机实例讲解¶
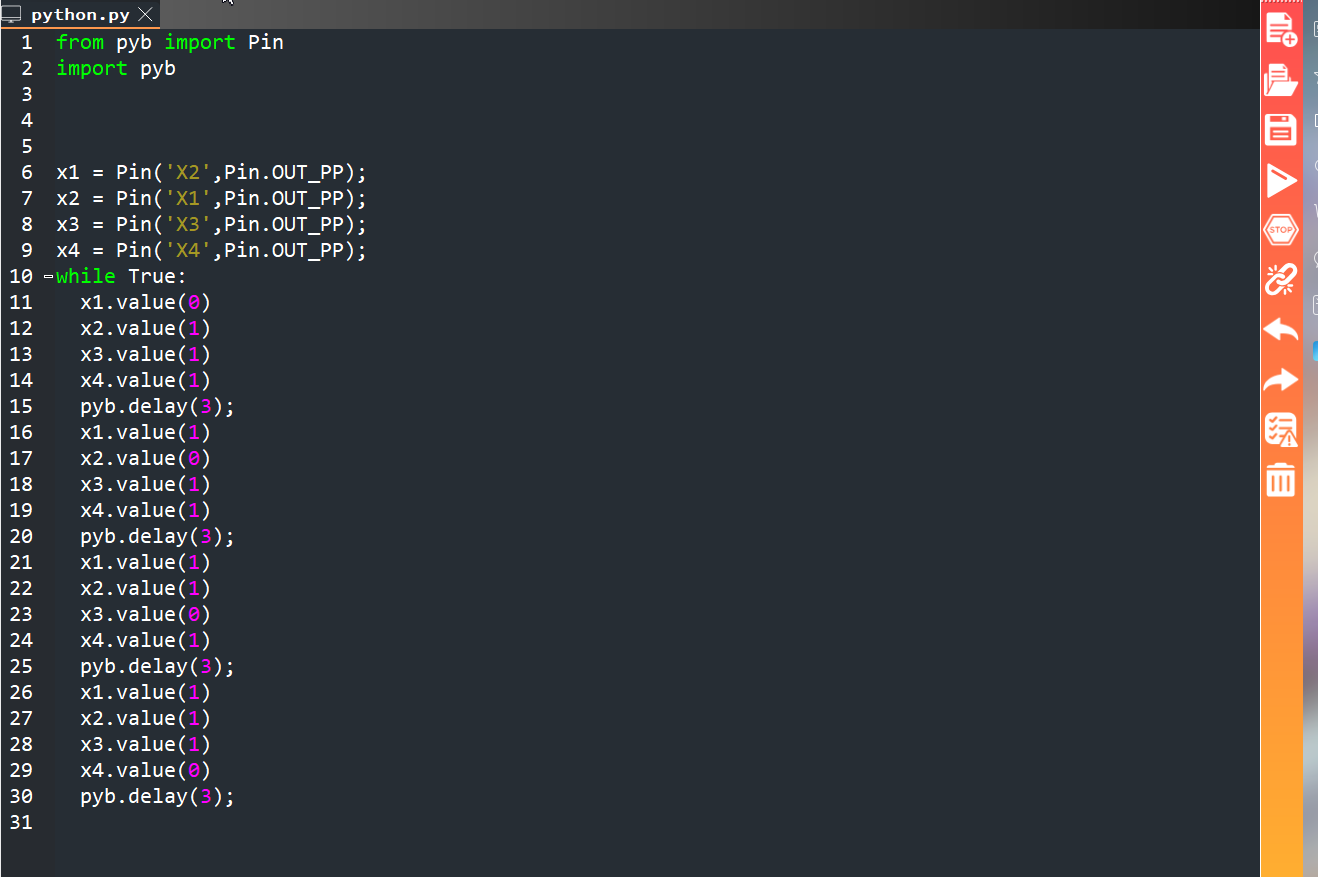
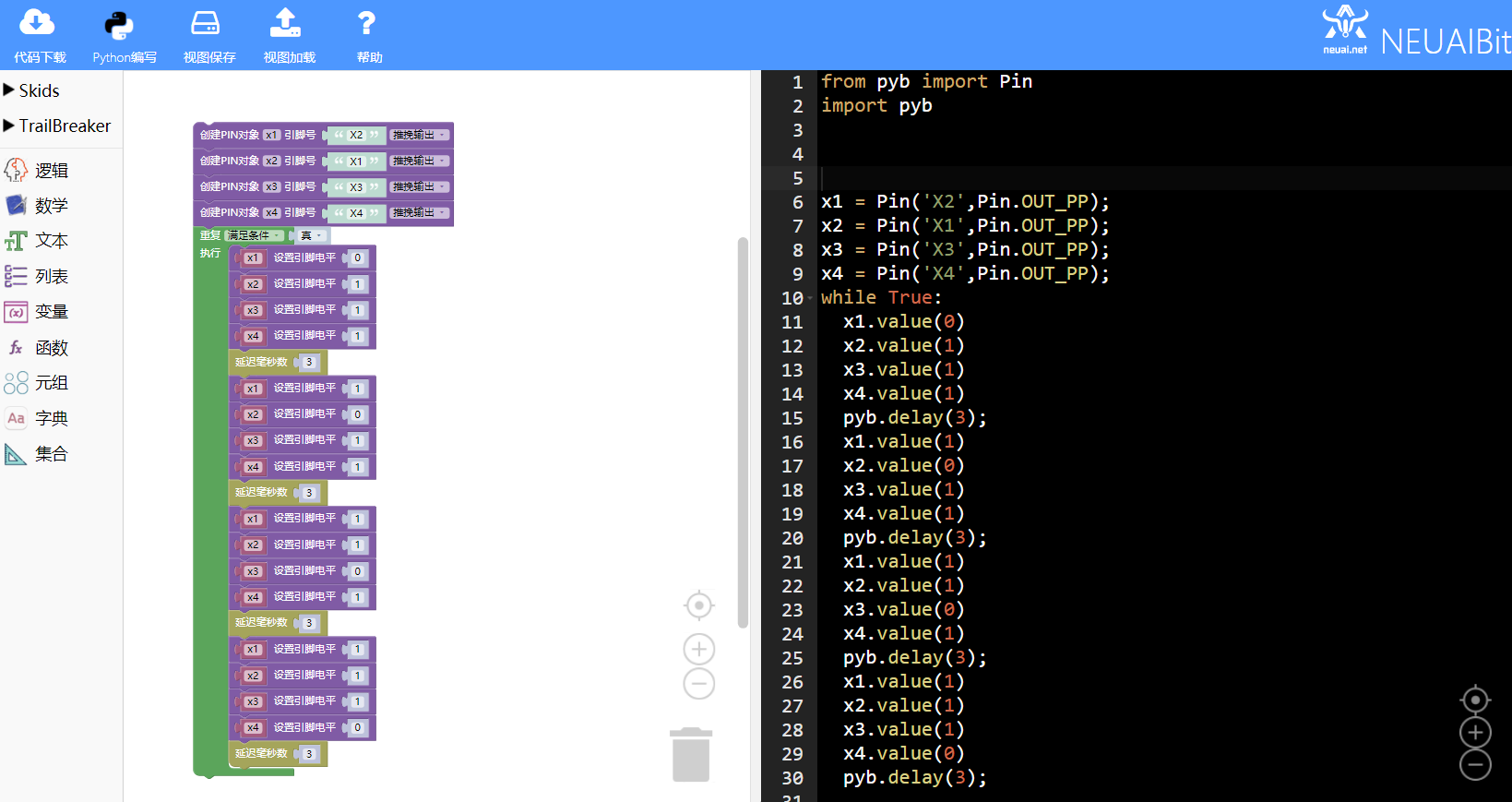
- 如下图显示步进电机实例的最终程序
2.3.1. 本章可以学到什么¶
- 知识点
- 积木块的基本操作
- 变量积木块的使用
- 循环积木块的使用
- 条件积木木块的使用
- 字符串转换积木木块的使用
- 编程的思路
2.3.2. 使用到的积木块列表¶
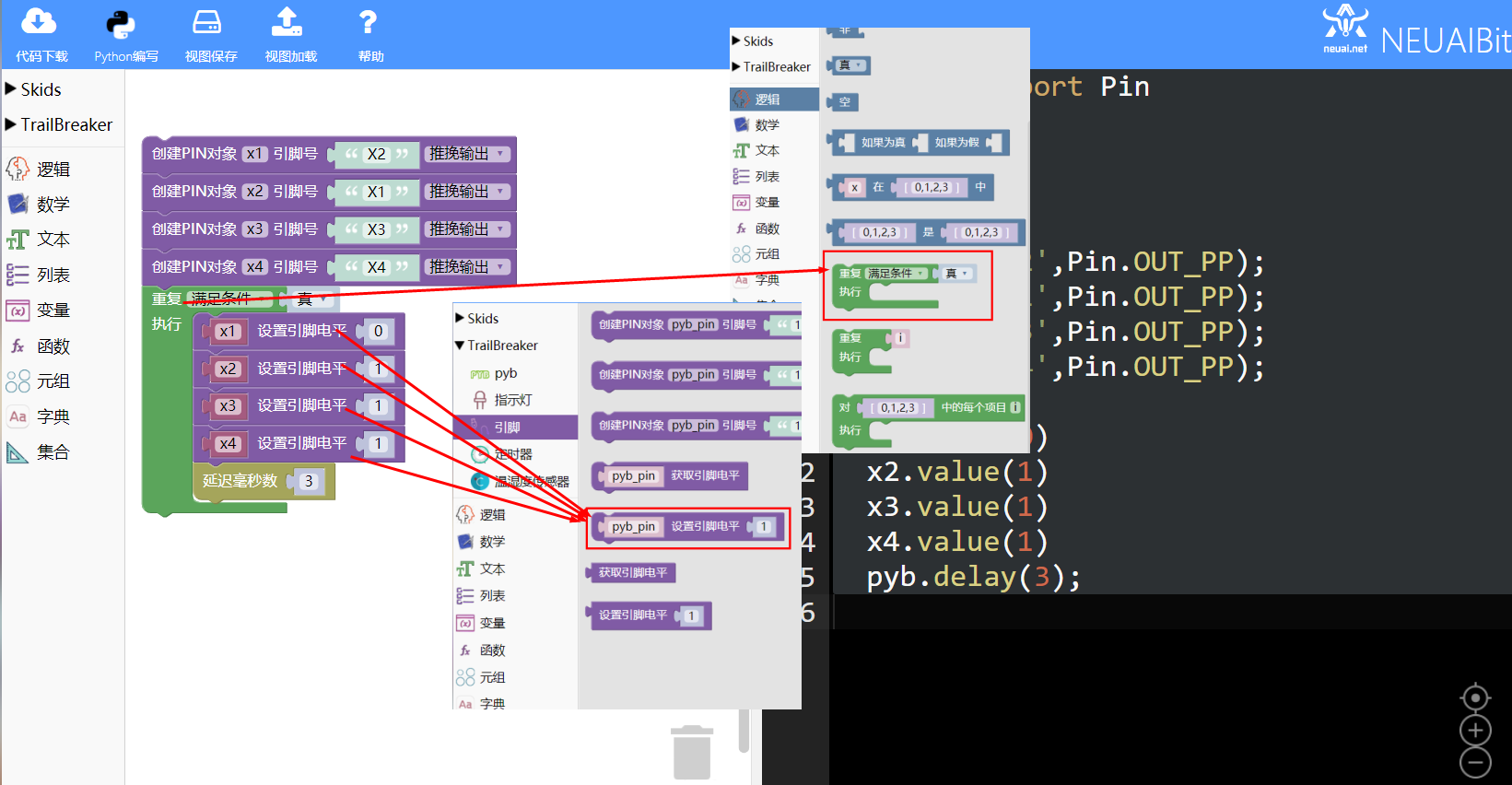
- 逻辑列表中的循环积木块
|
循环重复执行一些动作。 代码:while True: |
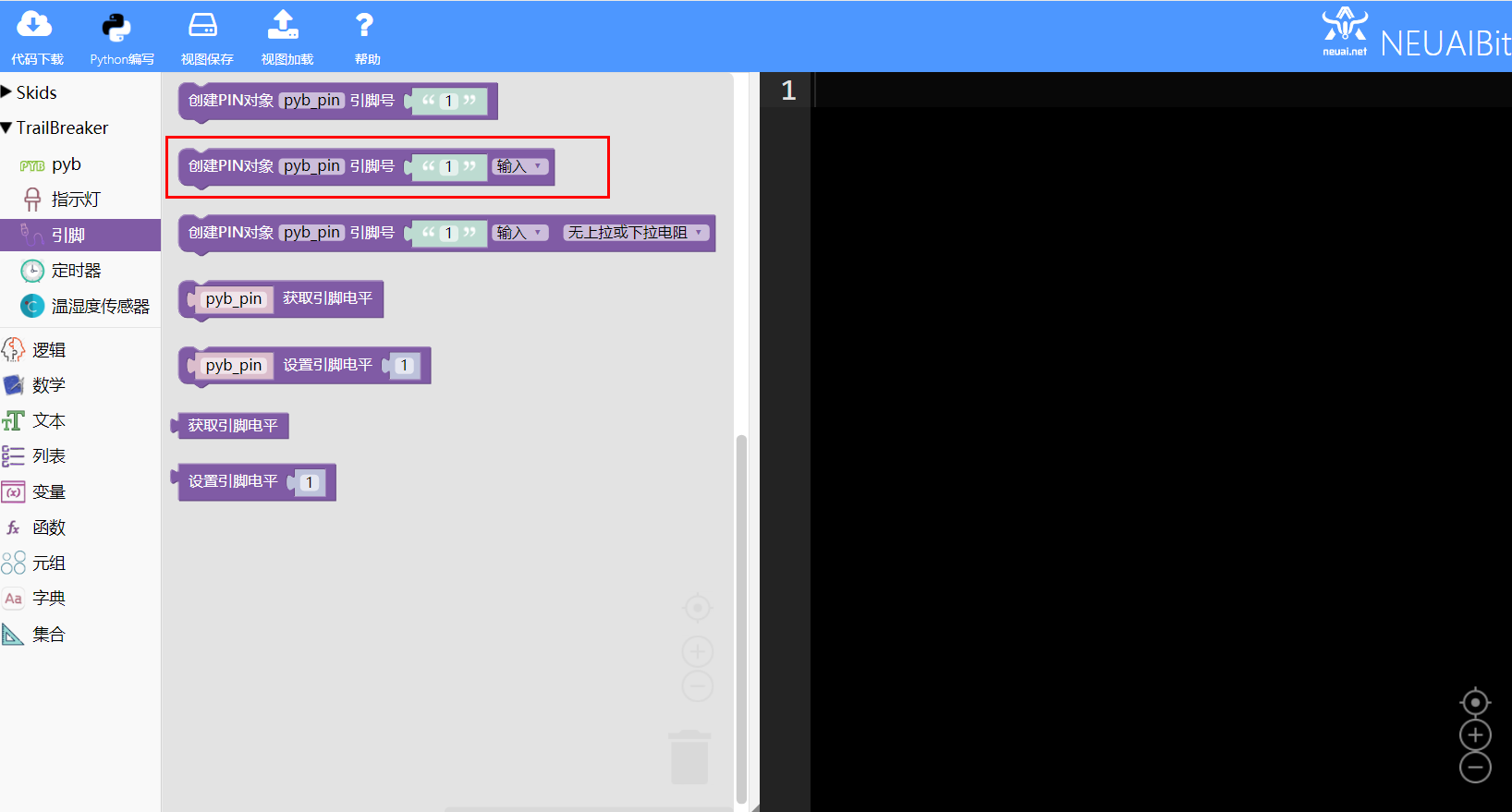
- Trailbreaker PIN功能块

|
创建一个PIN对象,参数为引脚号,引脚模式 代码:pyb_pin = Pin(‘1’,Pin.IN); |
|
设置引脚值 代码:pyb_pin.value(1) |
- Pyb时间相关的功能块
|
延迟给定的毫秒数 代码:pyb.delay(50); |
2.3.3. 实现思路¶
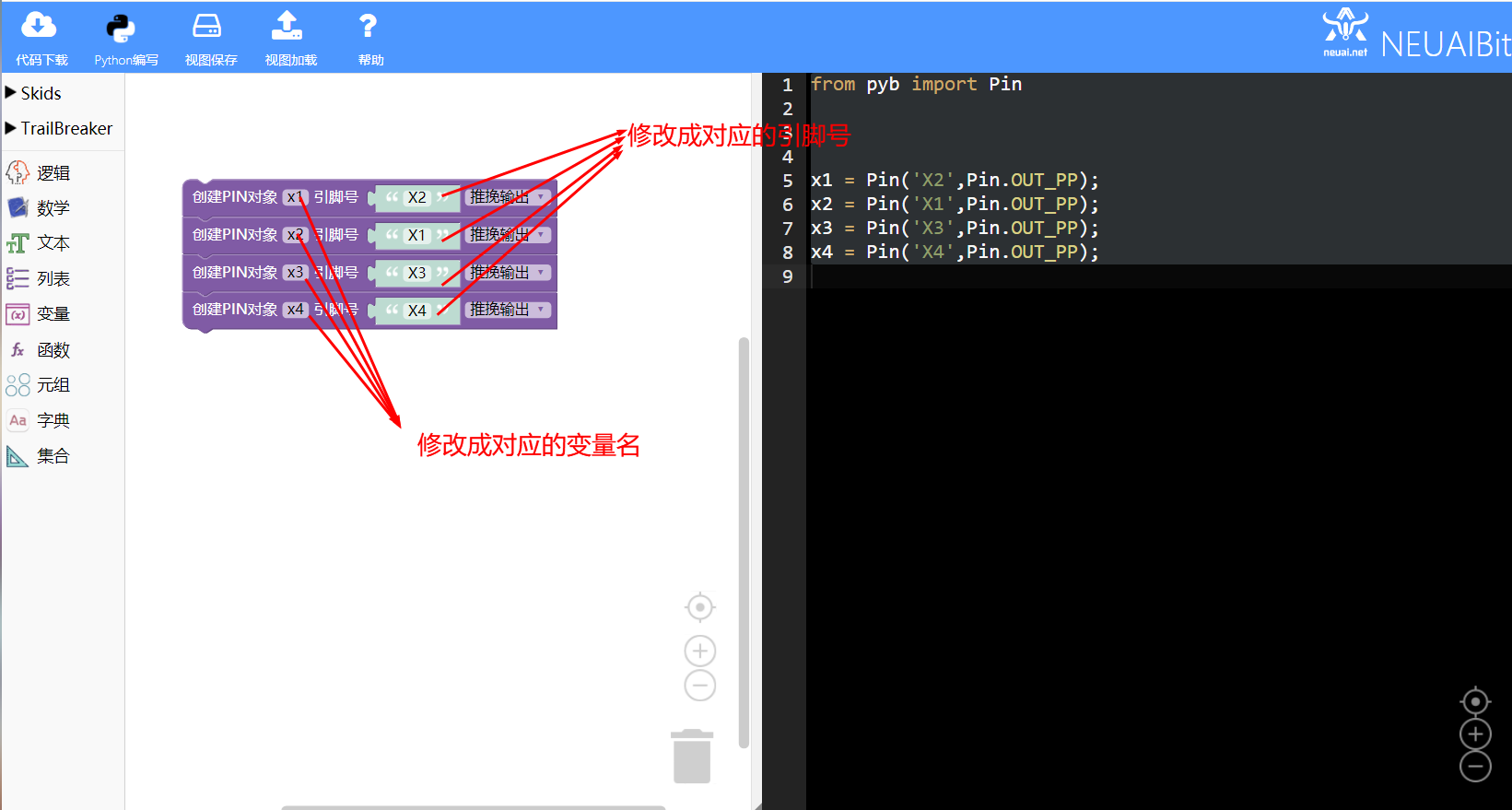
根据步进电机的特性创建对应的4个引脚对象,使用循环不断的设置引脚值,来控制电机运行。